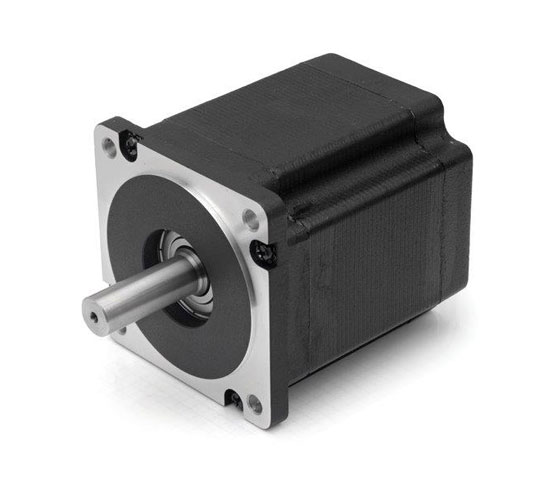
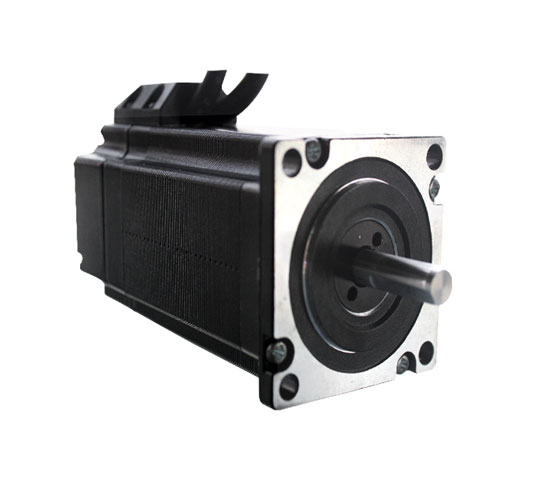
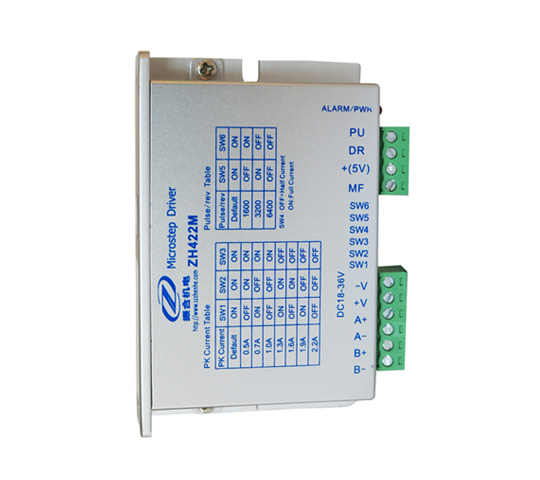
想让步进电机实现成功的连续运转,必须具备以下几点: 脉冲信号的产生:脉冲信号一般由单片机或CPU产生,一般脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则越大。 信号分配:我厂生产的感应子式步进电机以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍二种,具体分配如下:二相四拍为,步距角为1.8度;二相八拍为,步距角为0.9度。四相电机工作方式也有二种,四相四拍为AB-BC-CD-DA-AB,步距角为1.8度;四相八拍为AB-B-BC-C-CD-D-AB,(步距角为0.9度)。 功率放大是驱动系统最为重要的部分。步进电机在一定转速下的转矩取决于它的动态平均电流而非静态电流(而样本上的电流均为静态电流)。平均电流越大电机力矩越大,要达到平均电流大这就需要驱动系统尽量克服电机的反电势。因而不同的场合采取不同的的驱动方式,到目前为止,驱动方式一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流、细分数等。 为尽量提高电机的动态性能,将信号分配、功率放大组成步进电机的驱动电源。我厂生产的SH系列二相恒流斩波驱动电源与单片机及电机接线图如下: 说明: CP接CPU脉冲信号(负信号,低电平有效) OPTO接CPU+5V FREE脱机,与CPU地线相接,驱动电源不工作 DIR方向控制,与CPU地线相接,电机反转 VCC直流电源正端 GND直流电源负端 A接电机引出线红线 接电机引出线绿线 B接电机引出线黄线 接电机引出线蓝线步进电机一经定型,其性能取决于电机的驱动电源。步进电机转速越高,力距越大则要求电机的电流越大,驱动电源的电压越高。电压对力矩影响如下: 4、细分驱动 在步进电机步距角不能满足使用的条件下,可采用细分驱动器来驱动步进电机,细分驱动器的原理是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机运转的。 具备以上这些条件后就能实现步进电机的连续运转了,如果想实现步进电机的复杂运动,那就得使用单片机、plc之类的控制元件,或者专门的步进电机控制器。 |