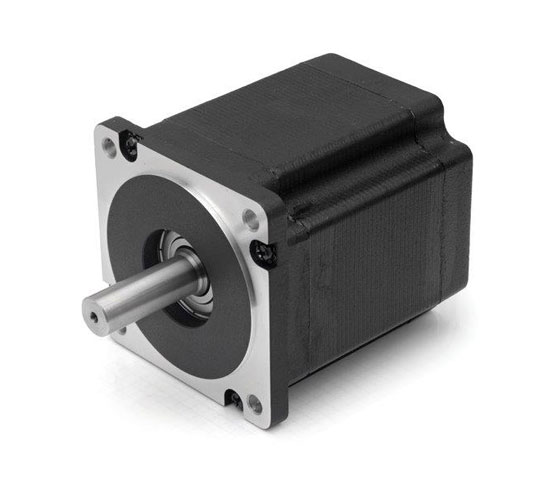
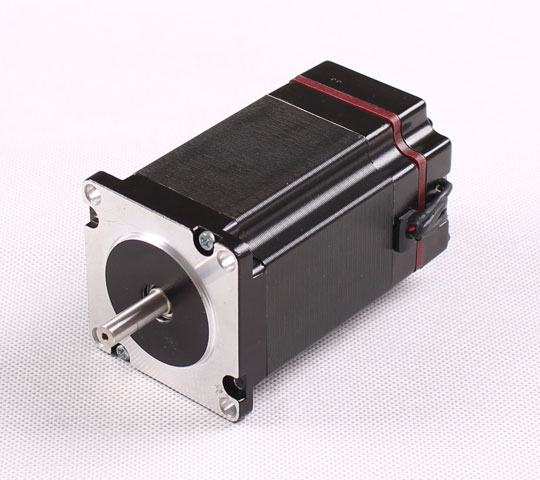
产品介绍 振合机电的混合伺服电机采用稀土永磁材料制造,与其它品牌混合伺服电机相比具有电磁损耗小,转换效率高,动态特性好等优势,有着控制方案集成度高,设计灵活,控制稳定,定位精准等特点。振合机电混合伺服电机以高精尖技术领先于电机同行业,多年来是众工业设备提高品质量的首选。 应用领域:广泛应用于自动化控制、精密机械加工、航天航空技术、消费产品、医疗器械、机器人、水下设施、纺织、半导体设备、包装机械、搬运机械及工厂自动化等需要精确定位,高精度,自动瞄准与自动记录等的领域。